Tras un intenso semestre, reabro con esta nueva sección dedicada a los drones; en esta ocasión aprenderemos a montar un circuito con un pequeño zumbador anti-pérdida para cualquier modelo de drone o aparato de radio control.
 Este pequeño hack nos servirá para que el aparato emita un pitido intermitente siempre que los leds del mismo parpadeen; es decir cuando la batería se esté agotando, o cuando el drone pierda la conexión con la emisora de control.
Este pequeño hack nos servirá para que el aparato emita un pitido intermitente siempre que los leds del mismo parpadeen; es decir cuando la batería se esté agotando, o cuando el drone pierda la conexión con la emisora de control.
En este ejemplo utilizaré mi Syma X8, pero el siguiente circuito debería ser compatible con cualquier drone; la única diferencia entre modelos radicará en que punto de soldadura conectaremos el colector del transistor que vamos a emplear.
Modulo zumbador DIY para drones.
Para desarrollar este pequeño proyecto necesitaremos un par de resistencias: una de 100Ω (R1), y otra de 3.9KΩ (R2); un zumbador piezoeléctrico lo más ligero posible y que opere entre 3-5V (en mi caso he escogido uno de 1.5 gramos y 30mA de consumo); un transistor NPN BC548; y finalmente cable, estaño, y soldador; para entender que aplicación tiene el transistor en nuestro circuito de una forma sencilla, visualizaremos el siguiente vídeo del canal de Oliver Nabani.
En mi caso lo he implementado con resistencias SMD para reducir el peso final del modulo, y no descarto en un futuro aligerarlo todavía más cambiando el transistor por uno SMD; también es posible hacerlo con resistencias cerámicas de forma más sencilla, y es por eso que he hecho el siguiente diagrama con ellas para que todo el mundo pueda desarrollarlo sin los problemas añadidos de la microsoldadura.
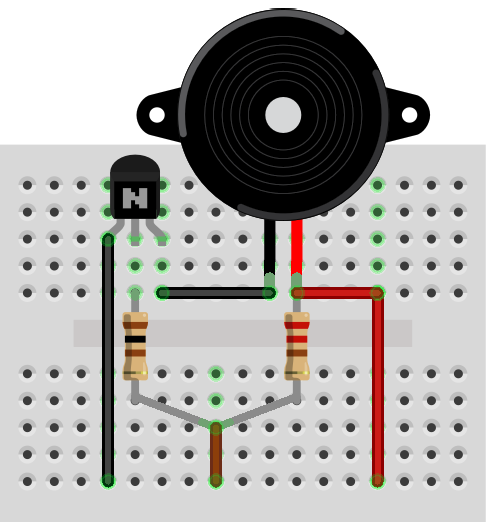
Diagrama del módulo zumbador para aparatos RC.
En primer lugar soldaremos el colector del transistor a la patilla negativa del zumbador; es importante fijarse en la curvatura del transistor que puede apreciarse en el anterior esquema, y que nos permitirá distinguir sus patillas a simple vista.
Patilla negativa del zumbador soldada al colector del transistor NPN.
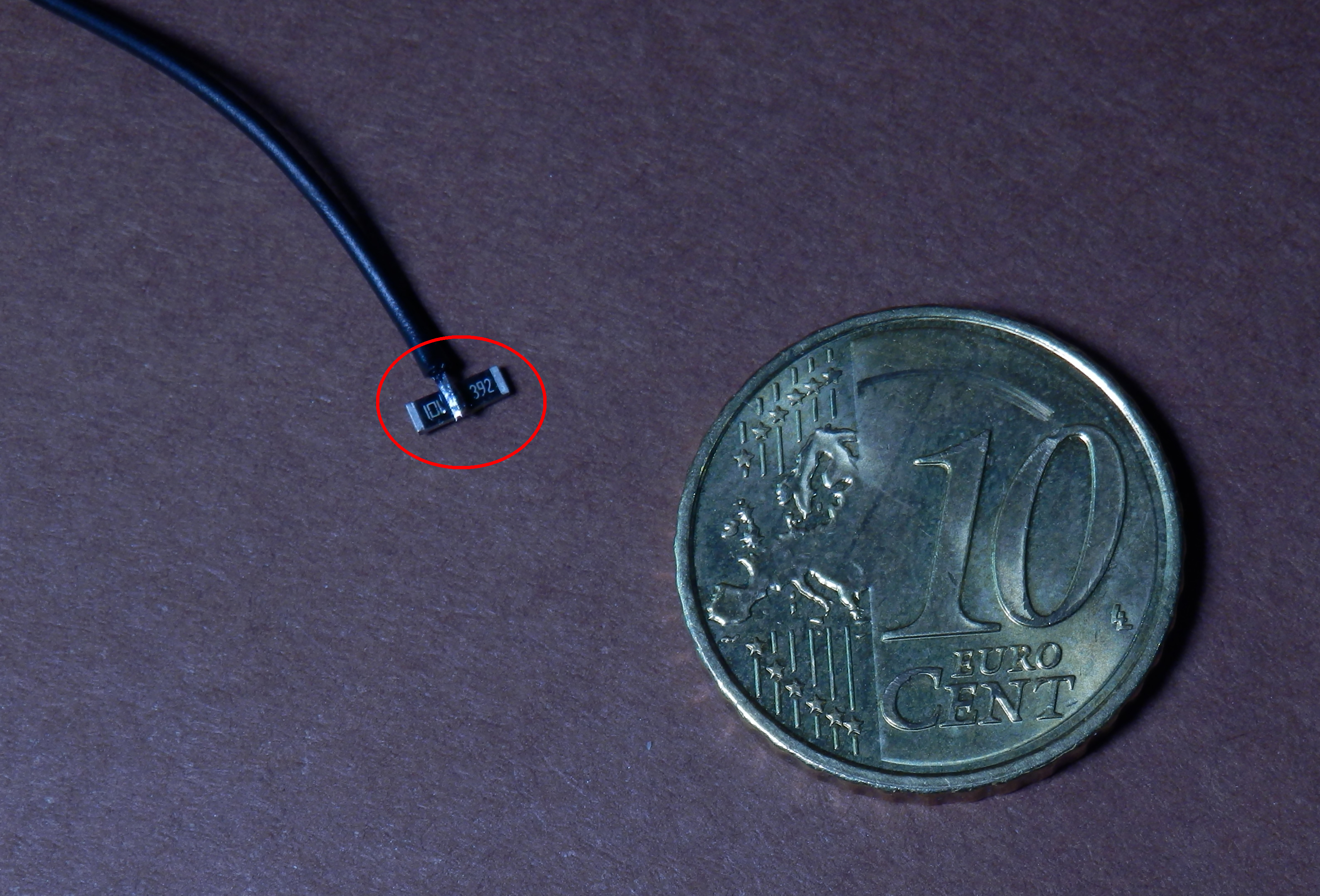
A continuación soldaremos ambas resistencias entre sí, en el caso de trabajar con resistencias cerámicas no tendremos mayor complicación que soldarlas, y luego aislar la soldadura; sin embargo con las resistencias SMD nos tendremos que ayudar con algún tipo de soporte y/o unas pinzas, debido a su reducido tamaño; también hay que recalcar que es vital estañarlas tanto por arriba como por abajo para evitar que termine por quebrarse la soldadura.
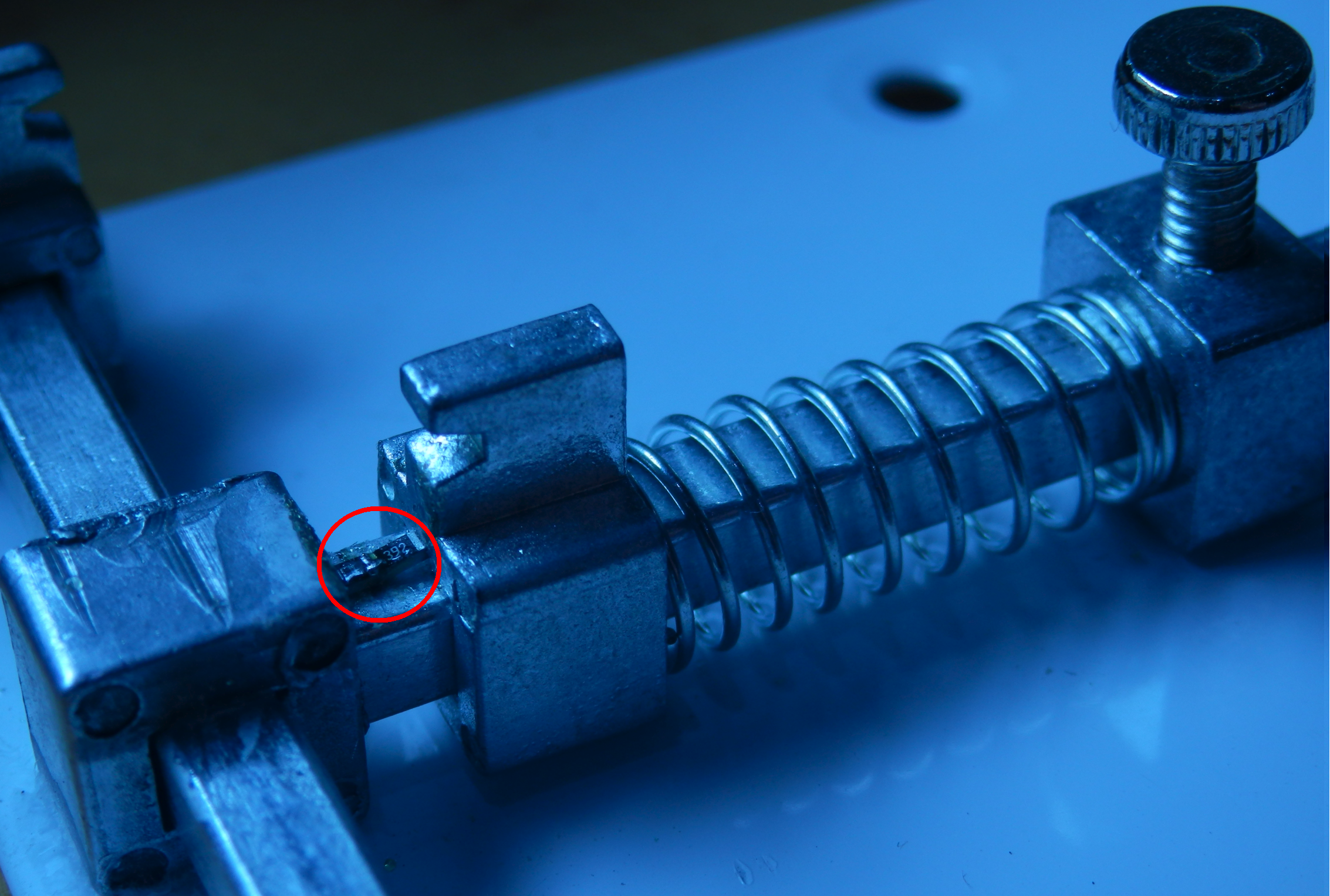
Soporte para soldadura SMD.
Una vez soldadas ambas dos entre sí, y previo a la extracción del soporte escogido, procederemos a soldar entre ellas un cable; en concreto el que aparece en color negro en el esquemático anteriormente mostrado.
Soldadura entre R1, R2, y el cable negro.
Llegados a este punto, soldaremos la resistencia de 3.9KΩ o R2 en el positivo del zumbador/buzzer, al que le soldaremos también un cable; en este caso el positivo del circuito, resaltado en color rojo en el esquemático del proyecto.
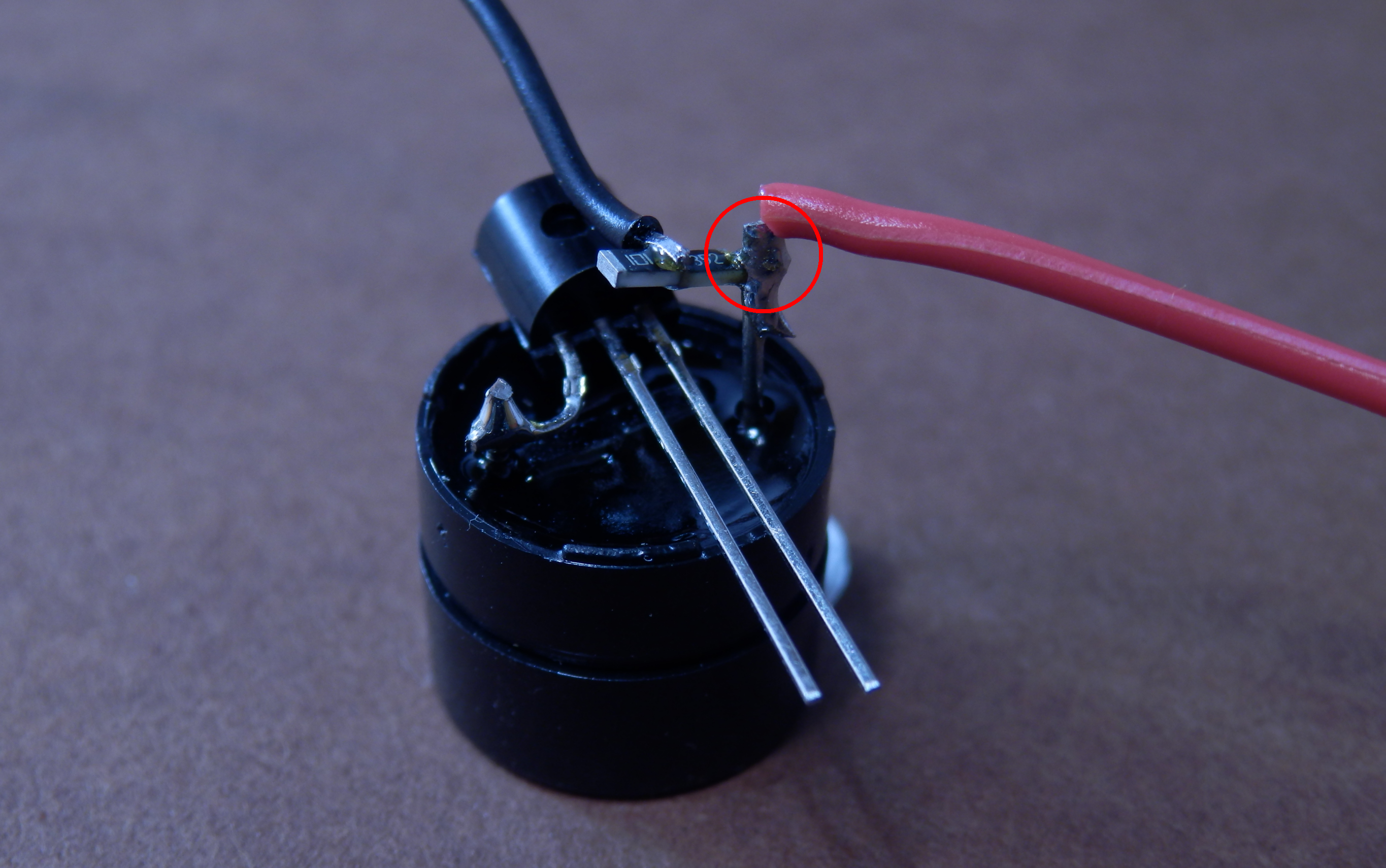
Soldadura entre la patilla positiva del buzzer, R2, y el cable rojo.
A continuación soldaremos la resistencia de 100Ω, o R1 a la base del transistor; que podremos identificar como la patilla del medio de su encapsulado.

Soldadura entre R1 y la base del transistor.
Para terminar de montar nuestro módulo, debemos soldar un tercer cable al emisor del transistor; preferiblemente de color marrón como en el esquemático, para diferenciarlo del otro negativo al cual ya habremos soldado previamente un cable negro.

Soldadura entre el emisor del transistor y el cable marrón.
Ahora abriremos nuestro drone y desatornillaremos la controladora de vuelo, para identificar donde vamos a soldar cada uno de los cables del módulo que acabamos de fabricar; primero buscaremos el punto de conexión del positivo de los leds, y le soldaremos el cable que proviene del positivo de nuestro zumbador.
Punto de soldadura entre el cable rojo y el positivo del circuito de los leds del drone.
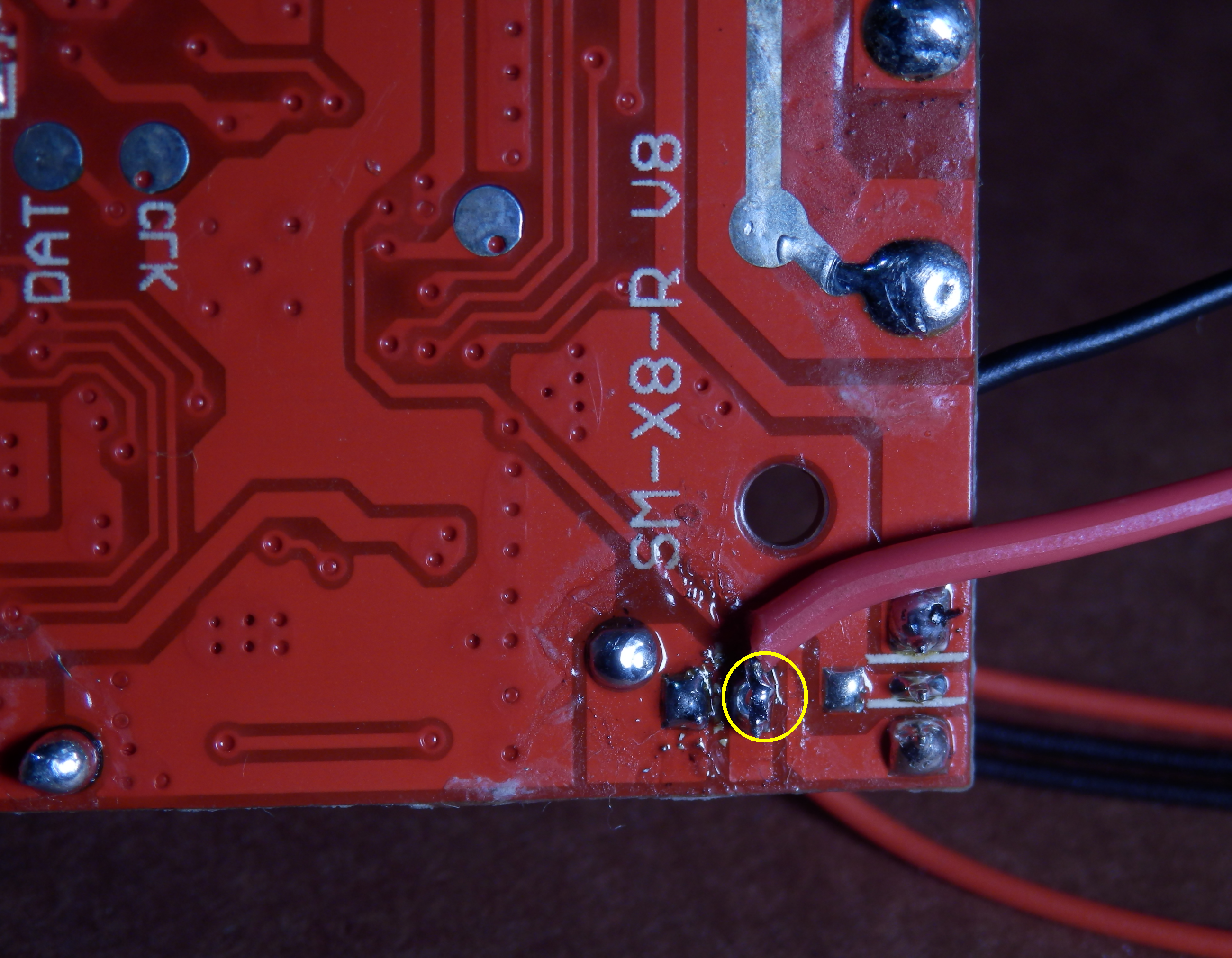
El otro extremo del cable marrón debemos soldarlo en el negativo de batería de nuestro drone; lo he localizado en el interruptor de encendido del mismo, para evitar en la medida de lo posible soldar directamente en la controladora de vuelo del quadricóptero.
Punto de soldadura entre cable marrón y el GND de la batería del drone.
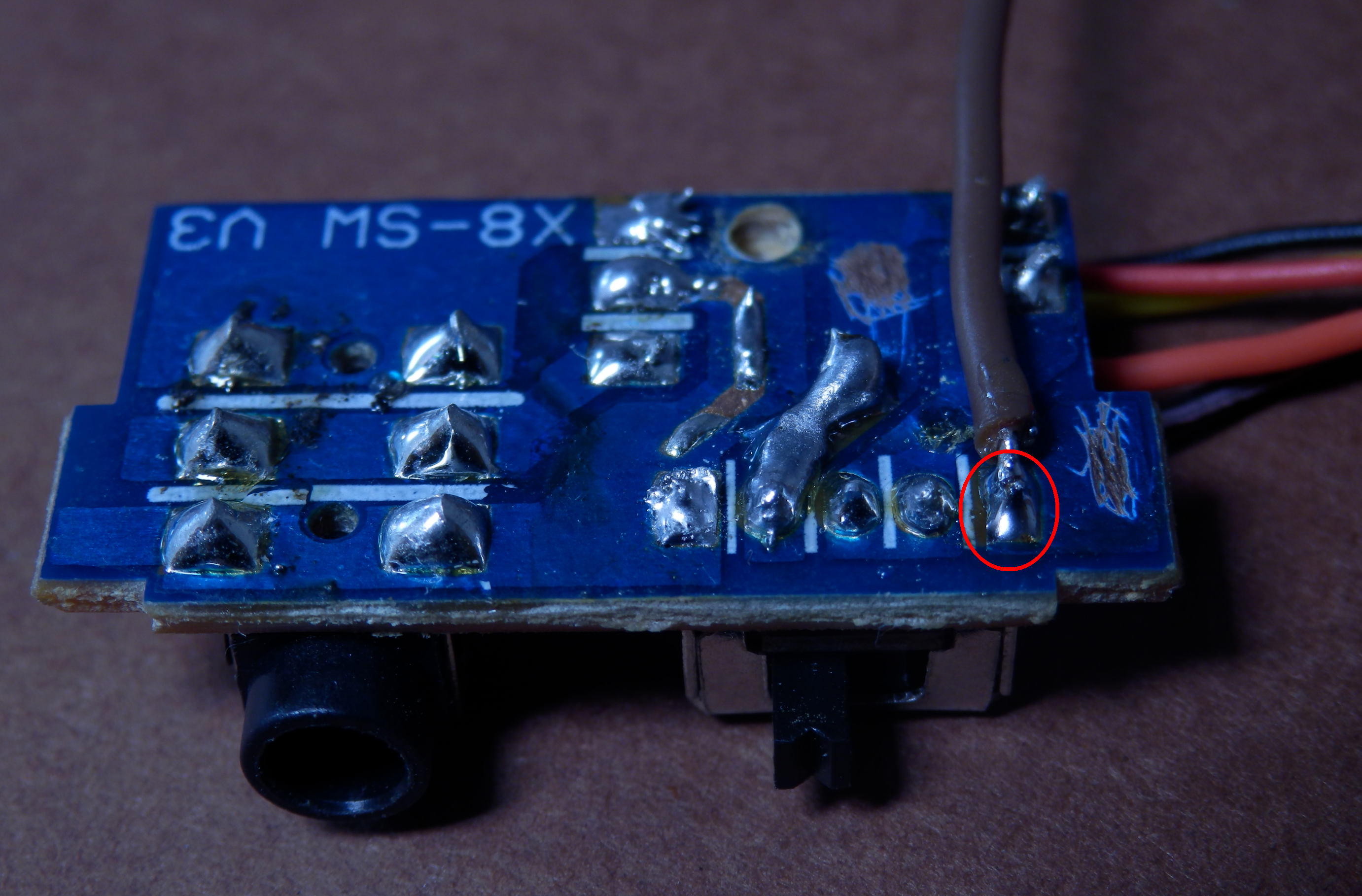
Finalmente soldaremos el segundo negativo, representado de color negro en el esquemático; en algunos modelos bastará con soldarlo al negativo del mismo circuito de los leds, pero en el caso del Syma X8 esto producirá un sonido constante durante todo el vuelo como se aprecia en el siguiente vídeo, ya que los leds bajan su luminosidad al parpadear, pero no se apagan completamente.
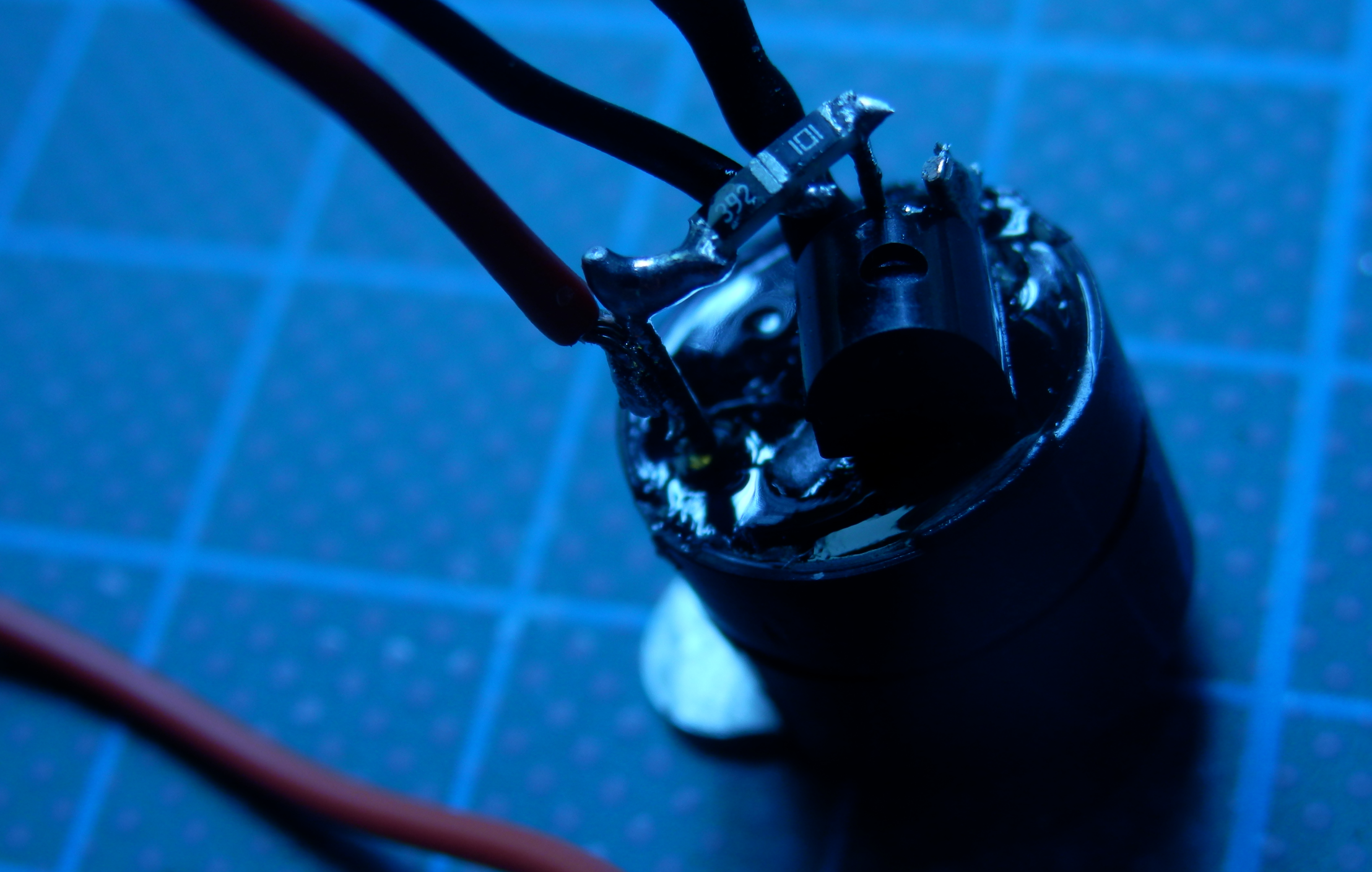
La solución a dicho problema pasa por soldar el cable en el negativo del diminuto led rojo de estado de la controladora de vuelo (puesto que este si se apaga), ubicado en el colector del pequeño transistor SMD que podemos ver en la siguiente imagen; únicamente estañaremos la punta del cable y la patilla del transistor, para finalmente unirlas, retirar la punta del soldador, y esperar hasta que la unión se enfríe por si sola.
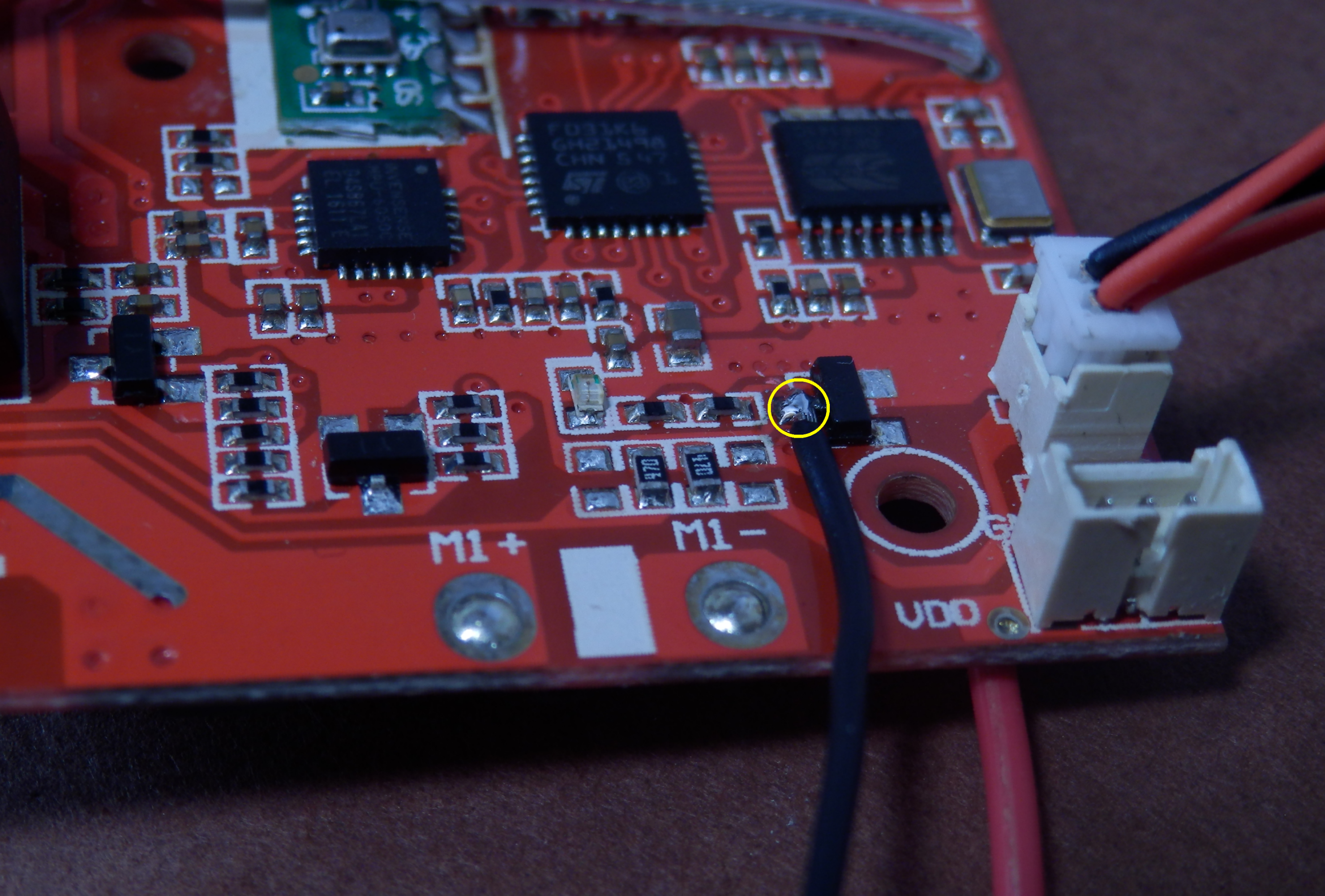
Punto de soldadura entre el cable negro y el negativo del circuito de los leds.
Ahora ya podemos comprobar el correcto funcionamiento de nuestro módulo zumbador conectando la batería a la controladora de vuelo; ya tras la prueba quitaremos la pegatina del zumbador y cerraremos nuestro drone, y con extremada precaución haremos una prueba de vuelo para verificar que todo funciona correctamente.
En los próximos tutoriales de esta nueva sección nos adentraremos en el mundo de los drones, aprenderemos a mejorarlos, y conoceremos los principios básicos de su funcionamiento, así como el hardware necesario para montar uno desde cero.
Si te ha gustado puedes seguirme en Twitter, Facbook, Google+, Linkedin, Feedly, o compartirlo con los botones ubicados debajo de esta publicación, si tienes cualquier pregunta o sugerencia no dudes en comentar.
Artículos relacionados
 Tanda de Noticias – ¿Fallo de seguridad o hacking de aeronaves?
Tanda de Noticias – ¿Fallo de seguridad o hacking de aeronaves? Conferencias – UPM TASSI 2014
Conferencias – UPM TASSI 2014- Tanda de nuevas notícias – Vuelta de vacaciones
 Es grande la diferencia entre Hackers y Crackers
Es grande la diferencia entre Hackers y Crackers- Tanda de nuevas notícias – Últimas noticias del mes
![Raspberry PI Zero – Timelapse con la nueva cámara de 8 megapíxels [Parte I]](http://www.peatonet.com/wp/wp-content/uploads/2016/06/Captura-de-pantalla-de-2016-06-19-21-49-37-150x150.png) Raspberry PI Zero – Timelapse con la nueva cámara de 8 megapíxels [Parte I]
Raspberry PI Zero – Timelapse con la nueva cámara de 8 megapíxels [Parte I] WittyPi – Review y tutorial del increíble HAT para Raspberry PI
WittyPi – Review y tutorial del increíble HAT para Raspberry PI MailRelay – Descubriendo su nuevo filtro por engagement
MailRelay – Descubriendo su nuevo filtro por engagement Cómo funcionan los inhibidores de frecuencia y por qué está prohibido su uso – Noticias
Cómo funcionan los inhibidores de frecuencia y por qué está prohibido su uso – Noticias Odroid XU4 – Review y comparativa del gran micro computador
Odroid XU4 – Review y comparativa del gran micro computador




